

Problem statement
Managing 3D point cloud data using Database Management System (DBMS) is challenging. The increasing size of point cloud data makes it difficult to conduct efficient data structuring, querying and indexing. Moreover, point could data have multiple parameters. Besides X, Y and Z coordinates, intensity, Red Green Blue (RGB) values and classification are common attributes of point cloud data. Unfortunately, there is no standard schema for storing these attributes. Some point cloud data may have four attributes, while some may have 13. The point cloud data with varying attributes can be simply imported into existing Relational-DBMS (RDMS), but storing one point per row will result in a table with millions of rows. Apparently, it is not a practical approach since the cost for indexing and querying will be high.
Solution
Our team of experts propose a DBMS solution based on PostgresSQL and its extension pgPointCloud. The key idea is to group groups point cloud data into patches, just like splitting a large table into numerous small tables, as shown in the figure below. With a relatively smaller number of patches, querying and indexing become more efficient. The spatial database also takes into consideration of 2D data, imagery/video, BIM and so on, aiming at integrating data from multi-sources.
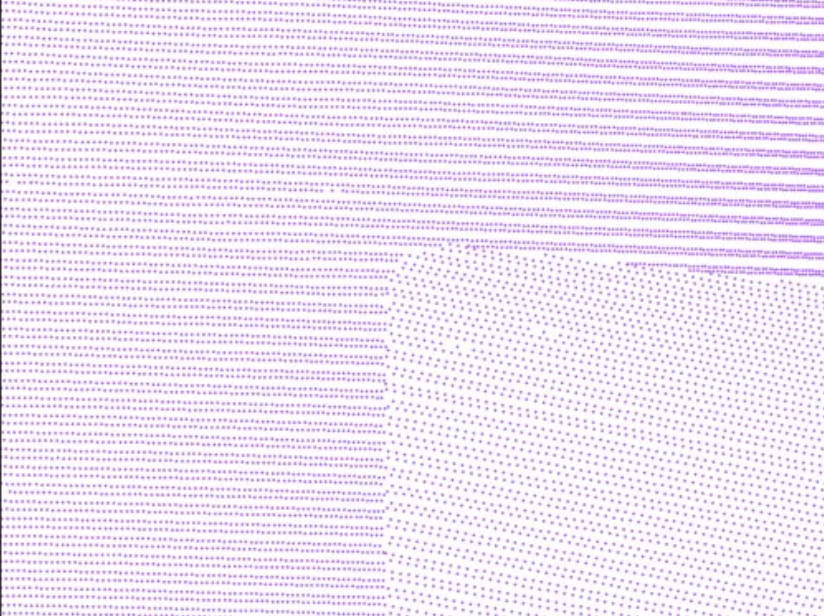
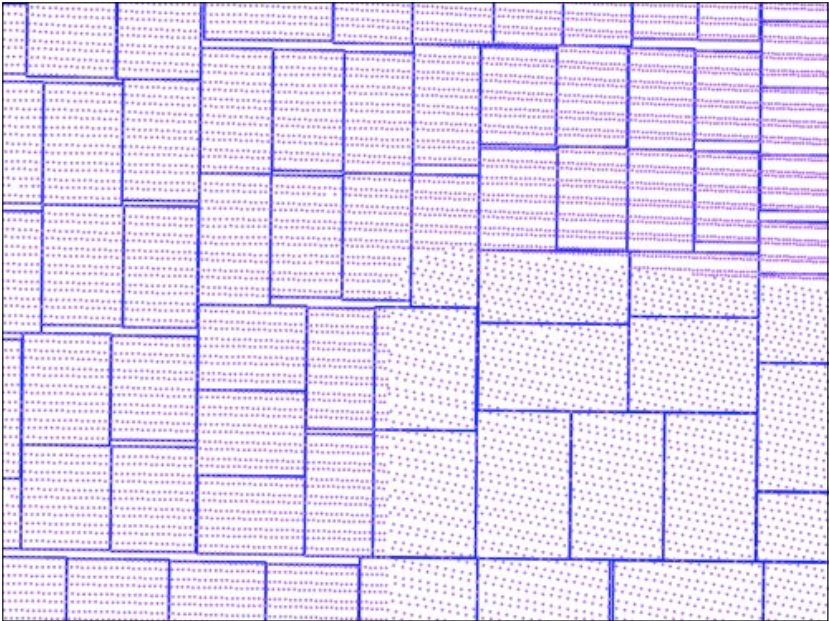
PGPointCloud convert a big point cloud dataset (left) into small patches (right) [Ramsey, P., LiDAR in PostgreSQL with PointCloud]
Outcomes
Our team of experts aims to investigate and develop a deep learning-based solution for 3D data processing. The solution can handle classification and segmentation tasks. Expected deliverables can be listed as follow:
- Detailed reports addressing identified issues and use cases for the stakeholders.
- Proof of concepts including prototypes of solution.
- National and international publications to provide visibility to the parties involved.