New glove-like device mimics sense of touch
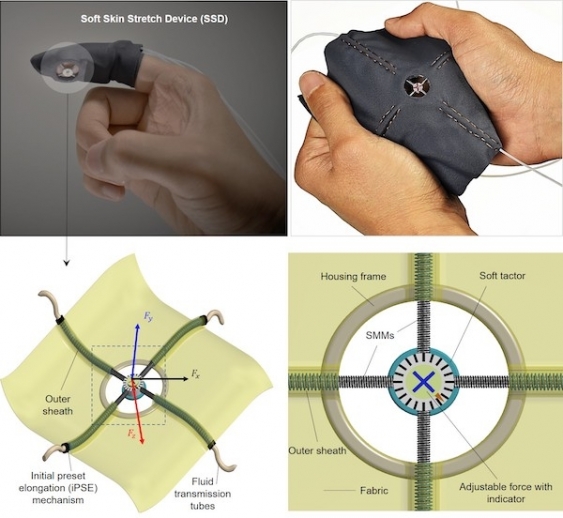
UNSW engineers have invented a soft wearable device which simulates the sense of touch and has wide potential for medical, industrial and entertainment applications.
Published on the 09 Sep 2020 by Caroline Tang